Minhocas são a inspiração para melhorar sistema de locomoção de robôs
Pesquisadores europeus estão trabalhando para a melhora no sistema de controle dos movimentos de robôs – e os modelos estudados são aranhas, caranguejos, lagostas e, principalmente, minhocas. Eles estão particularmente interessados na forma como o sistema neural interage com a locomoção desses animais. Imitar os impulsos nervosos rítmicos de alguns invertebrados pode ser a solução para criar movimentos automáticos e repetitivos que ajudam a movimentar robôs com mais naturalidade e sem problemas, assim como os organismos imitados.
Esses impulsos rítmicos são chamados de geradores de padrão central (CPG) e eles se adaptam muito bem ao movimento do robô em parte porque eles estão entre os circuitos neurais mais bem compreendidos do mundo animal (os sistemas funcionais dos invertebrados são muito simples de serem estudados e copiados, e as redes neurais se encaixam aí). Esses CPG essencialmente automatizam tarefas repetitivas. Após iniciar um processo comum, como engatinhar ou andar, com um estímulo neural, os CPG assumem controle da execução do movimento, como um piloto automático.
Isso é especialmente útil quando você possui várias peças móveis, como uma aranha faz ao caminhar em suas oito pernas. Tentar programa cada perna independente para trabalhar com as outros sete poderia ser difícil, mas os CPG simplificam tudo. Os pesquisadores podem desenvolver um CPG para cada junta e, em seguida, juntá-los para criar um CPG para a perna inteira e então uni-los todos para criar um CPG que faça o mecanismo inteiro andar. Isso pode ainda ser trabalhado com alguma inteligência básica que pode lidar com terreno acidentado ou eventos inesperados, trazendo o robô manter sempre um ritmo adequado.
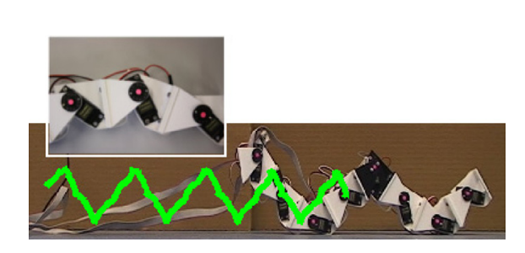
Usando esse conhecimento, pesquisadores espanhois criaram uma minhoca robótica que imita os movimentos do animal de verdade. As oito seções de CPG foram criadas em um simulador e em seguida transferidas para o robô, que agora se move com facilidade. A tecnologia poderia ser usada para suavizar e simplificar os movimentos dos futuros robôs autônomos, dando-lhes um aspecto mais natural.
